
Điều khiển tốc độ Motor DC
Chào các bạn, bài viết này sẽ hướng dẫn các bạn cách ứng dụng Transistor và Diode để điều khiển động cơ DC, rơ le.
Nội dung
- Các đặc tính của Transistor và Diode.
- Lập trình Arduino để điều khiển tốc độ động cơ DC với nút bấm (button).
Phần cứng
- Arduino UNO.
- 1 động cơ DC (loại 9V).
- 2 tụ 100nF (tụ gốm 101).
- 1 Transistor NPN.(loại N2222).
- Điện trở 1k ohm và 10k ohm.
- 1 nút bấm (button).
- 1 Diode. (loại N4007).
- Breadboard và dây dẫn.
Giới thiệu linh kiện
Transistor
Transistor là 1 linh kiện cho phép chúng ta điều khiển dòng điện có cường độ lớn hơn mức cho phép của Arduino (tối đa 40mA mỗi chân Digital).
Cấu tạo
- Gồm ba lớp bán dẫn ghép với nhau hình thành hai mối tiếp giáp P-N.
- Ba lớp bán dẫn được nối ra thành ba cực:
- Lớp giữa gọi là cực gốc hay cực nền (Base) ký hiệu là B.
- Hai lớp bán dẫn bên ngoài được nối ra thành cực phát (Emitter) ký hiệu là E và cực thu hay cực góp (Collector) ký hiệu là C.
Có 2 loại Transistor là PNP và NPN tương ứng với 2 cách sắp xếp 3 lớp bán dẫn. Trong bài này mình sử dụng Transistor loại NPN là N2222.

Mỗi loại Transistor có sơ đồ chân khác nhau, do đó, khi sử dụng 1 loại Transistor nào đó (VD:C1815, BC548...) bạn nên tìm đọc datasheet của nó (trên google) để sử dụng chính xác.
Nguyên lý hoạt động
Để đơn giản, chúng ta xem Transistor như 1 công tắc bình thường. Đối với Transistor NPN, khi một dòng điện có cường độ nhỏ (như chân digital của Arduino) được cấp vào chân Base, Transistor sẽ cho phép dòng điện đi từ chân Collector đến chân Emitter (theo chiều mũi tên trên kí hiệu). Khi chân Base không còn được cấp điện (ở mức LOW), sẽ không có dòng điện chạy qua transitsor.
Bạn có thể xem giới thiệu đầy đủ hơn về linh kiện này tại bài viết Transistor (BJT)
Diode (đi-ốt)


Diode là 1 linh kiện rất đơn giản, nó chỉ cho phép dòng điện đi qua theo 1 chiều (từ anot đến catot).
Trong bài viết này mình sử dụng Diode N4007 để bảo vệ các linh kiện trong mạch khỏi bị hư hỏng do dòng điện cảm ứng phát sinh khi motor, rơle, ...hoạt động. Dòng điện cảm ứng có chiều ngược với chiều dòng điện trong mạch, do đó gây hại cho các thiết bị điện trong mạch vốn chỉ hoạt động với một chiều dòng điện nhất định.
Ứng dụng Transistor và Diode
Chúng ta sẽ sử dụng Transistor và Diode để điều khiển motor DC vì:
- Chip vi điều khiển trên Arduino chỉ có thể cung cấp dòng điện tối đa 40mA trên mỗi chân Digital - nhỏ hơn yêu cầu của hầu hết motor.
- Khi hoạt động, motor sẽ tạo ra dòng điện cảm ứng (do hiện tượng cảm ứng điện từ) có chiều ngược với chiều dòng điện trong mạch. Do đó ta phải sử dụng Diode để triệt tiêu nó.
Lắp mạch
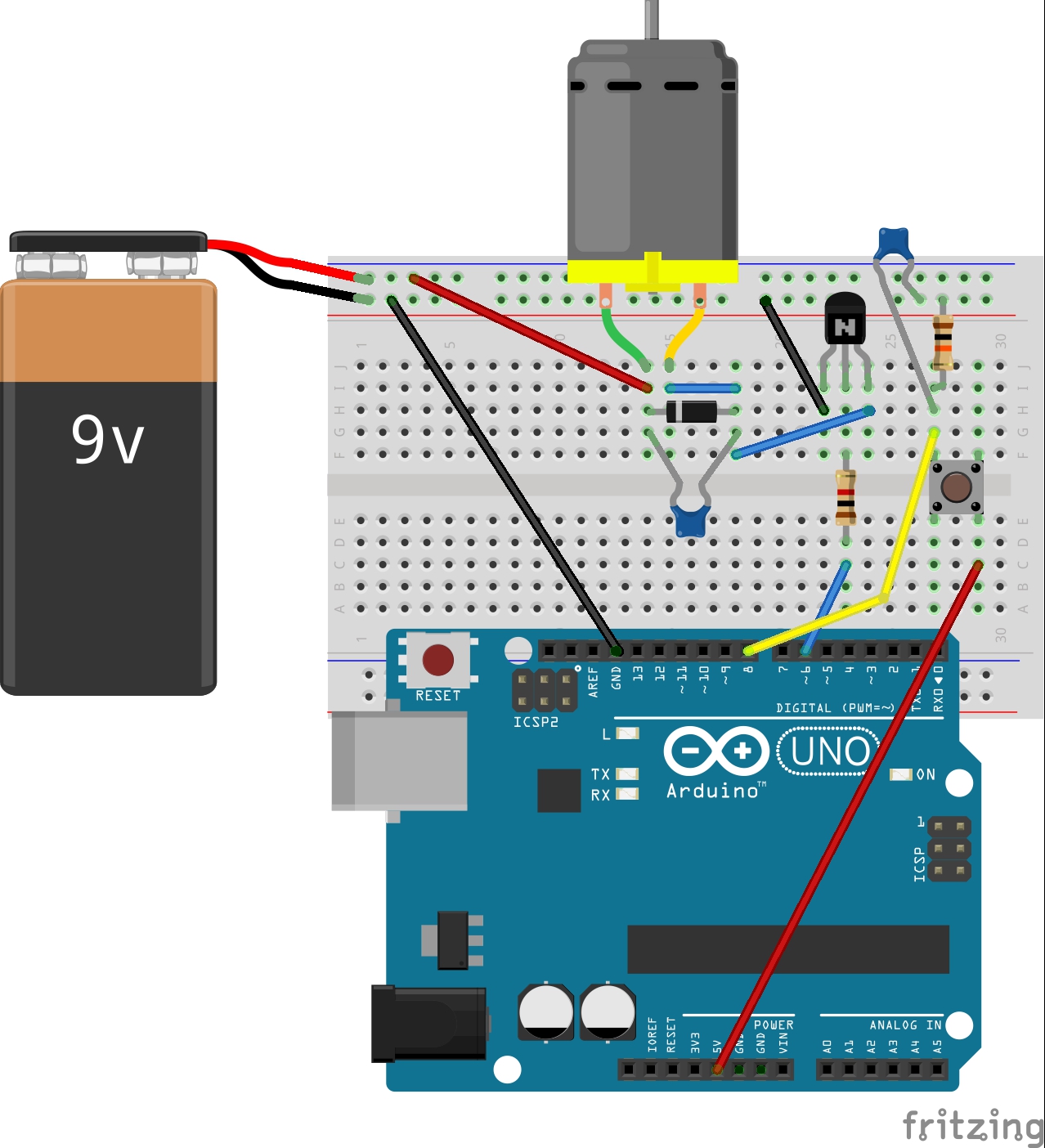
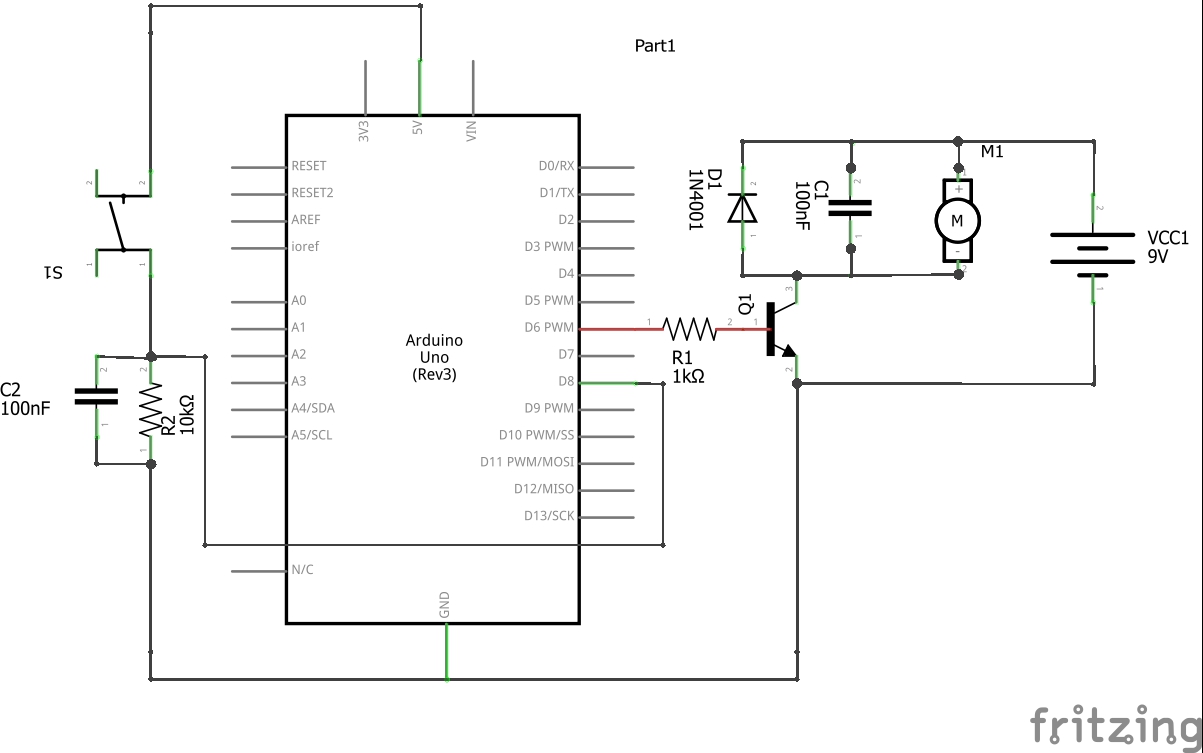
- Bạn có thể thay tụ 101 (C1,C2) bằng các loại tụ điện khác tương đương như 102,103,104,...
- Bạn có thể thay diode 1N4001 bằng các loại diode có chức năng tương đương.
- Các điện trở có thể thay bằng những điện trở khác có trị số gần bằng.
Lập trình
const int motor = 6; // khai báo chân PWM điều khiển motor const int button = 8; // khai báo chân đọc nút bấm boolean oldState = 0; // trạng thái của nút bấm int time; // biến lưu thời gian boolean state = 0; int speedMotor = 0; // biến lưu giữ tốc độ của motor void setup() { Serial.begin(9600); // giao tiếp Serial với 9600 baudrate. pinMode(motor,OUTPUT); pinMode(button,INPUT); } void loop() { if (digitalRead(button) != oldState) { // kiểm tra thay đổi trạng thái nút bấm time = millis(); // reset lại bộ timer khi nút bấm thay đổi trạng thái } state = digitalRead(button); // đọc giá trị nút bấm int duration = millis() - time; // đo thời gian duy trì trạng thái hiện tại duration = constrain(duration,0,5000); // 0 <= duration <= 5000 ms. if (state == 1) { //nếu đang nhấn nút speedMotor = map(duration,0,5000,0,255); analogWrite(motor,speedMotor); // xuất xung PWM để điều khiển tốc độ motor // duty cycle càng lớn thì motor quay càng nhanh delay(500); } Serial.println(speedMotor); // in ra Serial monitor giá trị tốc độ oldState = state; // cập nhật trạng thái nút bấm. }
Giải thích
- Đoạn code trên thực hiện việc xác định thời gian giữ nút bấm, sau đó chuyển giá trị thời gian đó sang xung PWM. Thời gian nhấn nút càng lâu thì motor quay càng nhanh.
- Chân Digital 8 sẽ điều khiển tốc độ motor bằng cách xuất xung PWM để cấp điện áp (mức HIGH) vào chân Base của Transistor ==> Transistor cho phép dòng điện đi qua ==> motor hoạt động. Duty cycle càng lớn thì điện áp đặt vào chân Base của Transistor càng cao ==> tốc độ motor càng lớn và ngược lại.
- Nếu không muốn điều khiển tốc độ, chúng ta chỉ cần dùng lệnh digitalWrite(motor,1)và digitalWrite(motor,0) để bật tắt motor.
- Nếu thay motor DC bằng relay (rơle) và lập trình 1 chút, chúng ta có thể điều khiển bật-tắt các thiết bị điện trong nhà như đèn, quạt,.... Sau này mình sẽ viết 1 bài về cách điều khiển thiết bị điện với remote TV và rơle.
0 comments:
Post a Comment